BeSpoon Range Test
First a correction. I don’t think the tag has anything else beyond the radio and a processor. I think all the other data is being provided by the phone. First I noticed that there was a field in the data that I dan’t noticed earlier “gps” that seems to have lat/long values. Then I noticed that the moving the tag was not changing the recorded accelerometer data.
I did a simple range test of the kind David suggested in a recent email. The results look pretty good, compared with the kind of results I got from the Nanotron.
Procedure
I used the same sort of procedure that I used for measuring the Nanotron. Basically I set sender and receiver on a wooden surface and then stepped off in one meter increments.
I used a lsightly different arrangement that what’s shown in this photo becuase I didn’t want to steel ruler to nterfere with the signal too much.
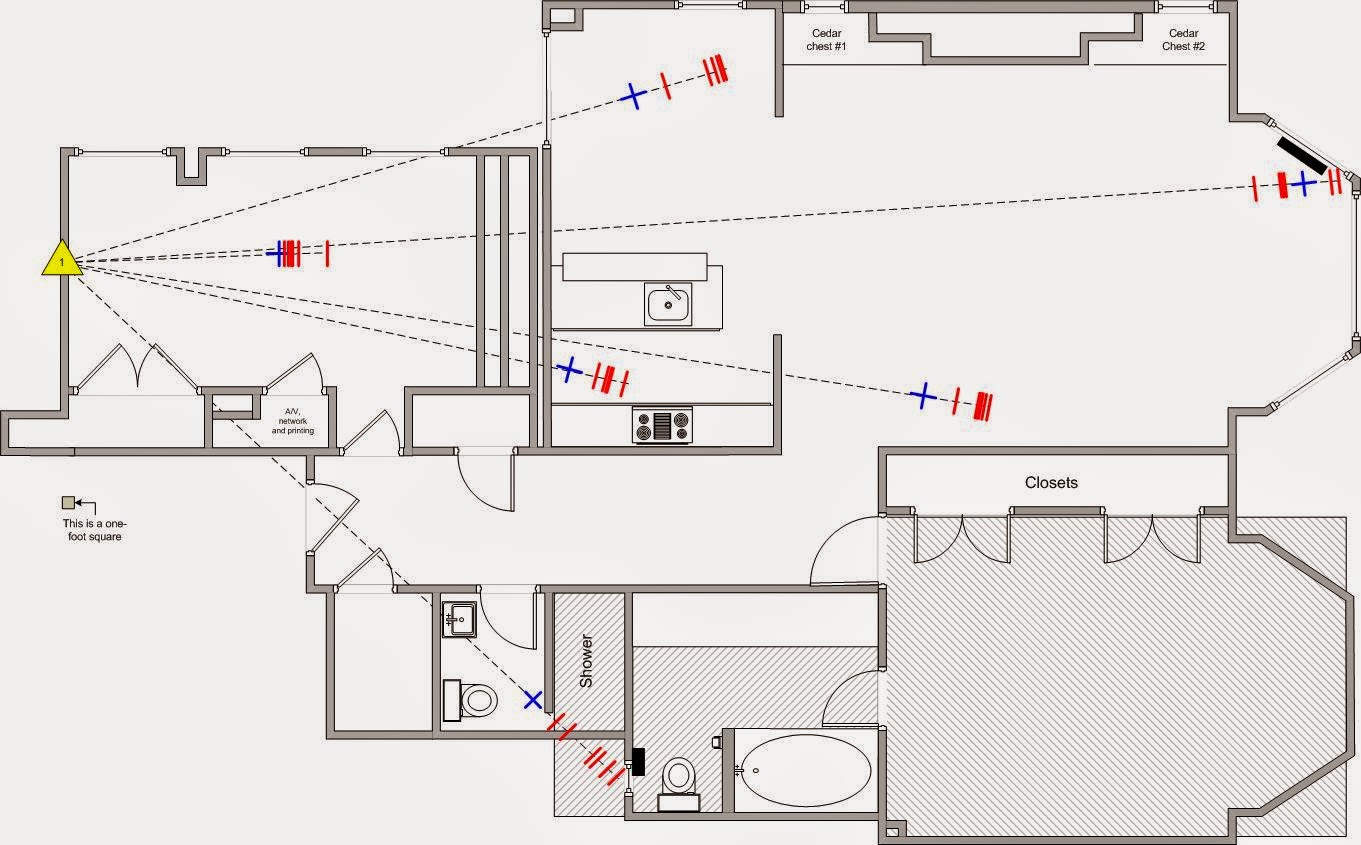
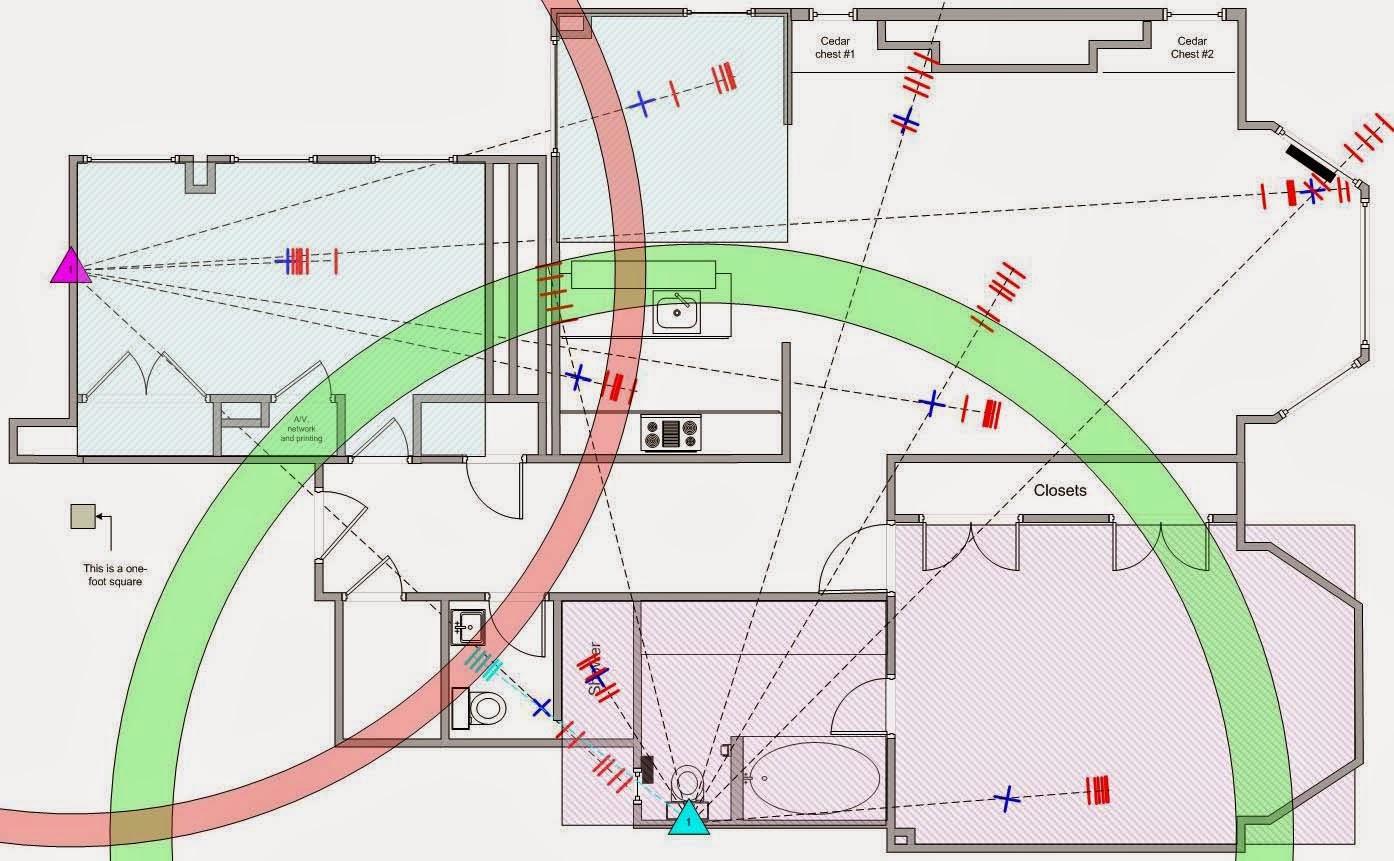
I put a tag on the arm of a wooden dining chain near the bay window. I measured off meters across the room until I ran out of space. (8 meters).
I set the phone on the wooden stool and moved it back to be exactly over the meter mark on the steel ruler. I used the UWB-logger program to capture the data. Because the UWB program doesn’t provide any feedback, I monitored ranges on the main system UWB panel.
I wasn’t sure if the tag would go to sleep if it wasn’t moving for a while. To make sure that it was awake I walked back and gave it a tap to make sure.
Here’s a detail from the transition from 1 to 2 meters.
I assume the knee in the curve is the range changing as I move the phone. I need to find some way to figure out how long it takes for the phone to get stable data. The obvious thing is to turn off the tag, but the UWB Logger program crahes when it loses the tag.
David writes:
It looks like there is a gradually increasing error at meter marks that snaps into position at 6 meters.
This must be random. Right?
Are you logging all range results and walking the tag in meter increments along the tape?
Thanks for doing all the grunt work. Sorry I can’t be there to help.
Mik responds
Answers:
I don’t think is is as systematic as that. I suspect experimental error. I think I need to write my own software for the phone to do this right.
Yes, I was logging all values as I walked the phone along the tape. The UWB logger is so cumbersome that I thought it was easier to capture the whole data set. I thought the data would be more obvious to interpret than it is. I also have the accelerometer data for the phone that shows when the phone was stationary.
The measurement process should be improved as follows:
- Exactly establish the distance, accurate to the millimeter.
- Leave the tag on all the time.
- Use wooden stools to get the tag and phone as much into free-space as possible (no metal within at least a meter)
- Leave phone and tag off until ready to take measurement. Then turn them on, and take a sequence of N measurements.
- Rotate and flip the phone and repeat. (to see if the antenna is seriously polarized).
- Rotate and flip the tag for similar reasons.
Choosing N correctly will be important because if N is too large then our power budgets are trashed. N has to be just large enough to allow the ranger to stabilize, and for samples to converge.
I don’t think it is possible to do the experiment above without having hardware that can be turned on/off with BLE.
Also, I’m not sure what we would learn in practice.